













Ученые Наньянского технологического университета (NTU) разрабатывают мобильную аддитивную систему для 3D-печати строительными смесями, способную укладывать материал прямо во время движения ради расширения охвата.

Размер области построения привычных строительных 3D-принтеров вне зависимости от конструкции ограничен размерами самих систем. При необходимости увеличения рабочей зоны принтеры приходится масштабировать, но это приводит к целому ряду дополнительных проблем с жесткостью конструкции, точностью позиционирования, не говоря уже о стоимости. Существуют мобильные и транспортабельные системы, такие как 3D-принтер на гусеничном шасси нидерландской компании CyBe Construction или 3D-принтер с телескопической рукой российской компании Apis Cor, легко умещающийся в грузовик, но и в этих случаях мобильность крайне условна. Тот же гусеничный 3D-принтер всего лишь облегчает собственную погрузку и разгрузку, а также позволяет перемещать аддитивное оборудование с места на места для 3D-печати серии блоков.
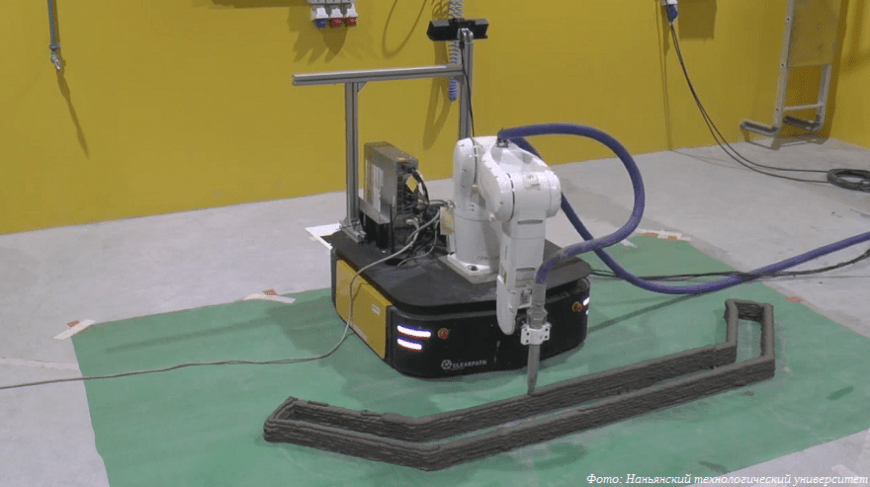
В этом и состоит главное отличие разработки группы сингапурских инженеров с факультета машиностроения и аэрокосмической техники Наньянского технологического университета. В ее основе обычные многоосевые роботы-манипуляторы, широко используемые в аддитивных системах самого разного назначения, но роботы перемещаются по полу цеха, печатая на ходу, что значительно увеличивает площадь построения. Практическим ограничением здесь служит площадь самого цеха.
В экспериментальном порядке инженеры уже напечатали образцы размером до 2100х450х100 мм при том, что длина руки робота не превышает 870 мм. Предсказуемо, главной проблемой пока что остается ровность поверхностей: в цехе аппарат работает без проблем, но на строительной площадке на таком шасси далеко не уедет. Впрочем, опытная система уже использует для координации движений примитивную систему машинного зрения, состоящую из камеры и маркеров на полу, так что в теории после доработки подобного робота можно поставить и на платформу повышенной проходимости. Доклад научной команды опубликован по этой ссылке.
Источник: 3dtoday.ru


