Подробная инструкция по сборке гоночной машины-робота. У этого робота всего один датчик, но уже грамотно продумана схема, что позволяет автоботу перемещаться очень быстро и управляться с пульта ДУ!
Версия лего миндсормс nxt 2.0 (версия 8647)
Сложность строительства ,
программирования:
Этот автобот выглядит и управляется как настоящий автомобиль!
Констуктивно он разработан так, что передние колёса имеют поворотную платформу и
поворачиваются с помощью двигателя. В конструкции также есть "хитрые" шестерёнки,
увеличивающие скорость вращения задних ведущих колёс.
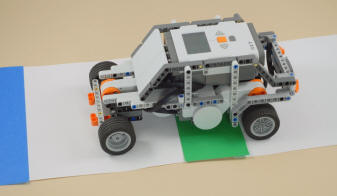
Датчик цвета находится под гоночной машиной лего так, чтобы автомобиль мог совершать
простые автономные операции, считывая цвет поверхности. Датчик может распознать
шесть различных цветов, так что вы можете сделать автомобиль, который будет реагировать на
различные цветные линии, цветные полосы бумаги и т.д.
Вы также можете управлять автомобилем с помощью дистанционного управления или с
простого двухкнопочного проводного пульта дистанционного управления (требуется только
один NXT комплект) или беспроводным Bluetooth-пультом дистанционного управления от
другого NXT. Примеры пультов: 5-и кнопочный пульт дистанционного управления (пульт ДУ) или удаленного
рулевого управления. Специализированные программы для всех этих трех
пультов дистанционного управления имеются. Их можно скачать бесплатно.
Автономная работа с цветом датчика
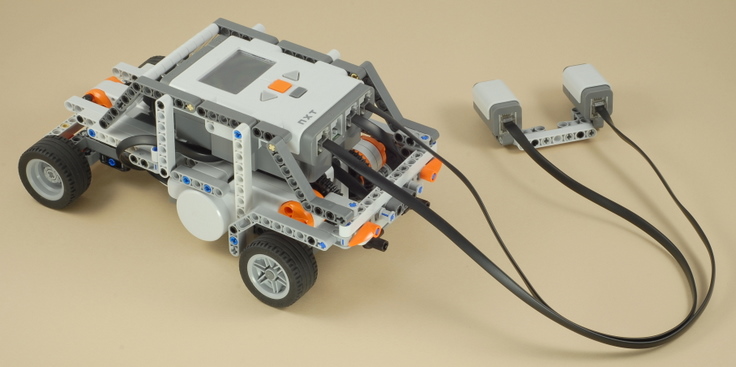
Проводной двухкнопочный пульт дистанционного управления
Беспроводной Bluetooth блок управления с 5-ю кнопочным пультом дистанционного управления
Беспроводной Bluetooth блок управления с удаленным рулевым управлением
Инструкция по сборке машины из лего
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
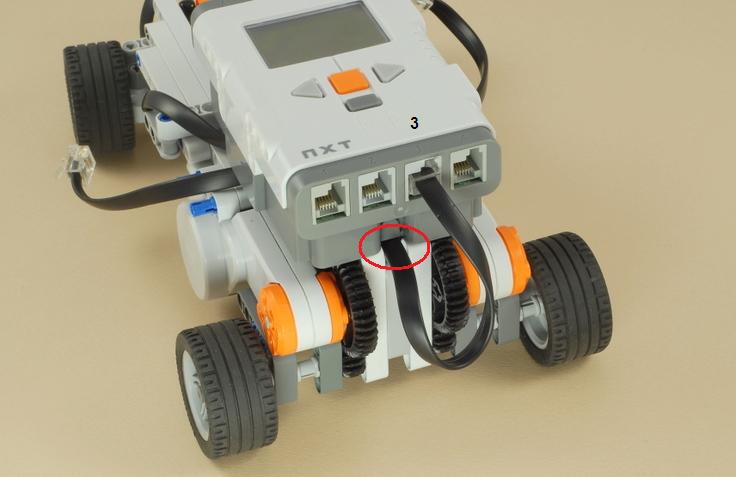
Провод датчика цвета должен выйти из пространства в центре задней панели блока NXT.
Подключите его к порту 3 на контролере NXT.
Два двигателя подключите к портам В и С на блоке NXT. Провода должны быть
пересечены дважды (один раз у блока NXT и в другой раз под лего-машиной), так чтобы двигатель
B оставался по левой стороне автомобиля и двигатель C находится на правой
стороне.
Провод рулевого двигателя передних колёс должен выйти из пробелов в центре передней панели NXT.
Скрутите провод пару раз, чтобы он занимал меньше места и лежал компактно (смотка будет скрыта за
лобовым стеклом построенного позже), а затем подключить его к порту на NXT.
17
18
19
20
21
22
Поздравляем, лего машина на пульта управления готова к настройке программы и дальнейщим испытаниям!!!
Итого получится четыре программы: две для автобота с одним блоком NXT, и
две для удалённого управления по Bluetooth, предназначенные для использования с 5-и кнопочным
пультом дистанционного управления и удаленного рулевого управления (обязательно наличие двух NXT блоков).
Простая программа NXT:
Программа ColorRace демонстрирует несколько примеров автономного поведения,
используя цвет датчика реагировать на изменения цвета поверхности. Вы можете
создать короткий «курс» на автомобиль, чтобы двигаться и отметить действия с
разноцветными ленты или полоски бумаги. Цвет датчика может смысле шести
различных цветов, и в этом примере программы действий для шести номеров цвета:
1. Черные: Игнорируется
2. Синий: Поверните налево (начало поворота на первый синей линии, остановка поворот на втором синяя линия)
3. Зеленый: Скорость до полной мощности
4. Желтый: Замедление до 30% мощности
5. Красный: Стоп
6. Белый: Игнорируется
Лего автомобиль должен быть запущен с передними колесами указал прямо перед собой
(корректировать их, прежде чем начать программу, повернув ручку колеса на
рулевой двигатель), и начнем прямо вождения медленно.
Обратите внимание, что автономную работу сложно, потому что есть ограниченный
контроль, а также руководящий много механических "помои" в нем, что позволяет
получать прямой старт и последовательным оказывается сложной задачей.
Вам также может понадобиться изменить цвета, используемые в программе для
корректировки цвета вашего пола и маркеры используются. Чтобы проверить, какой
цвет автомобиля видит на различных поверхностях, используйте View » Color
функцию в меню кирпича NXT-н-ролл автомобиля по различным поверхностям.
Программа 2ButtonSteer будет контролировать Race Car с двумя сенсорными датчик
проводной пульт дистанционного управления, показанный в шаге 22 здания выше
инструкции. Автомобиль должен быть запущен с передними колесами указал прямо
перед собой (корректировать их, прежде чем начать программу, повернув ручку
колеса на рулевой двигатель). Нажмите и удерживайте обе кнопки идти ехать прямо,
нажмите и удерживайте нажатой одну кнопку, чтобы включить в этом направлении, и
отпустить обе кнопки, чтобы остановиться. Вы также можете настроить скорость
автомобиля с помощью стрелка влево и вправо Стрелка на NXT.
Bluetooth управляющих программ (Два NXTs обязательно):
Программа 5ButtonSteer является управляющая программа для Race Car, который
предназначен для использования вместе с 5 Кнопка удаленного управления проектом.
См. инструкции для этого проекта.
SteerBTCar программа управляющая программа для Race Car, который предназначен
для использования вместе с удаленного рулевого управления проектом. См.
инструкции для этого проекта.
Задачи для обучения
Некоторые части конструкции гоночного автомобиля предназначены только для
"украшения", чтобы сделать его похожим на машину. Попробуйте зачистки его вплоть
до предметов первой необходимости, а затем создать собственное тело для того,
чтобы придать ему другой вид.
Дизайн простой цветной курс для использования с программой ColorRace. Вы
заметите, что трудно получить устойчивые результаты из-за механических отстойные
в рулевой и ограниченный вход датчика. Можете ли вы какие-либо другие стратегии,
которые вы могли бы использовать? Например, вы могли бы сделать "дорога" с
разноцветными полосками по бокам, что сигнал автомобиля, чтобы повернуть налево
или направо, чтобы вернуться на дорогу. Если вы едете достаточно медленно, вы
можете быть в состоянии следовать простой путь, как это.
Существует возможность на капоте автомобиля, где можно было монтировать
ультразвуковой датчик лицом вперед. Попробуйте добавить, а затем написать
автономная программа, которая использует его.
Программа 2ButtonSteer не указал способ сделать автомобиль пойти в обратном
направлении. С учетом всего четыре комбинации состояний кнопок (ни, влево,
вправо, и другое), эксперимент с назначением различных действий четырех штатах,
чтобы попробовать различные способы, чтобы двигаться. Например, возможно,
автомобиль может ехать прямо, когда обе кнопки будут освобождены и движения в
обратном направлении, когда оба нажатия (будет интересно вождения без
тормозов...)
Как упоминалось выше, рулевое управление дизайном в этой машине есть много
механических отстойные в в, большая часть которого поступает из передач, которые
привод рулевого управления (загар конической передачей вождения черные
20-зубчатой передачи). Это называется "передача люфта". Можете ли вы редизайн
автомобиля повернуть в сторону рулевого двигателя и его привод рулевого оружие
напрямую, без этих двух передач? Это устранило бы много люфта и сделать рулевое
управление более точным. Однако, некоторые люфт будет еще присутствует быть от
NXT сам двигатель (который имеет внутренние шестерни со своими люфта).
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте Этот автобот выглядит и управляется как настоящий автомобиль!
Констуктивно он разработан так, что передние колёса имеют поворотную платформу и
поворачиваются с помощью двигателя. В конструкции также есть "хитрые" шестерёнки,
увеличивающие скорость вращения задних ведущих колёс.
Этот автобот выглядит и управляется как настоящий автомобиль!
Констуктивно он разработан так, что передние колёса имеют поворотную платформу и
поворачиваются с помощью двигателя. В конструкции также есть "хитрые" шестерёнки,
увеличивающие скорость вращения задних ведущих колёс.