19.02.2011, 13:36
Источник: Pink Tentacle

|
Высокая скорость, ловкость, интеллект – вот что нужно промышленным роботам, как бы говорит нам профессор Исикава этой демонстрацией (фото с сайта mainichi.jp). |
Один робот – питчер (подающий), другой робот – бэттер (отбивающий). Рука-манипулятор кидает стоящей напротив машине мяч, и та чётко отбивает его подобием бейсбольной биты. Впечатляющим достижением поделились с общественностью профессор Масатоси Исикава (Masatoshi Ishikawa) и его коллеги из университета Токио.
"Теоретически по технологии японского профессора в будущем можно было бы создать робота, который мог бы профессионально играть в бейсбол", — писали мы в далёком 2002 году, когда Исикава показал машину, способную ловить брошенный ей мяч.
И вот это произошло в рамках проекта Sensor Fusion, цель которого – научить роботов воспринимать информацию с множества сенсоров и оперативно на неё реагировать, подобно тому, как это делает человек с его органами чувств.

| | Роботу-бэттеру всё равно, кто или что кидает мяч. Он отобьёт его, если подающий – человек (фото Ishikawa Komuro Laboratory). |
Робототехническая рука разработана в Массачусетском технологическом институте (MIT), а вот трёхпалая кисть, способная сжиматься и разжиматься 10 раз в секунду и попадать в так называемую страйк-зону (высотой 1 метр, шириной 0,8 м) с 90-процентной точностью, – детище профессора Исикавы.
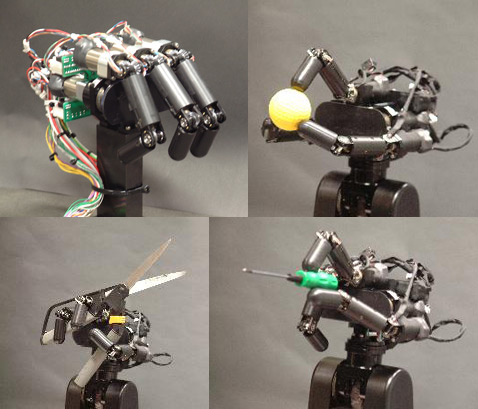
| | Манипулятор называется просто Highspeed Hand – высокоскоростная рука. В 2005 году мы рассказывали, что этот робот ловит мяч, летящий со скоростью 300 км/ч (фото Ishikawa Komuro Laboratory). |
Видеоролик ниже показывает, как роботы, находящиеся друг от друга на расстоянии 3,5 метра, играют в бейсбол. Один кидает мяч со скоростью 40 км/ч, а другой видит бросок благодаря камере, делающей 1000 кадров в секунду, и отбивает.
В будущем японцы намерены увеличить скорость полёта мяча до 150 км/ч и сделать так, чтобы робот мог её менять, а также закручивать мяч.
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте

