03.12.2009, 18:10
Источник: membrana

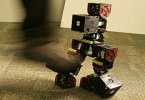
Даже команды-соперники по состязанию роботов назвали эту скромную на вид машинку "фантастической системой" (фото Nicholas Roy).
Представьте, что крошечный летающий робот попал в настоящий лабиринт из незнакомых ему коридоров и комнат. Без каких-либо команд от операторов, без сигналов GPS, в реальном времени он должен сориентироваться в обстановке и найти заданную цель, добравшись до неё быстро и без аварий, не заблудившись по дороге. Это уже реальность.
Именно таков летательный микро-аппарат (micro air vehicles — MAV), построенный в группе "Надёжных роботов" Массачусетского технологического института (Robust Robotics Group). Главной задачей при его создании была шлифовка автономной навигации, способной в тесных закрытых помещениях прямо на ходу выстраивать "в голове" трёхмерную карту местности и сообразно ей планировать своё дальнейшее перемещение.
MAV из Массачусетса построен по четырёхроторной схеме – четыре подъёмных винта размещены по углам этого "вертолёта" (корректнее сказать — летающей платформы). Поперечник аппарата составляет примерно 60 сантиметров –достаточно немного, чтобы спокойно проникать в двери. Вращают винты электромоторчики, получающие питание от бортовых аккумуляторов.

Одна из предыдущих версий четырёхроторной машины из Массачусетса испытывалась на природе. Однако, как оказалось, летать в помещениях в определённом смысле сложнее. Если машина должна двигаться самостоятельно (фото Robust Robotics Group).
Главные органы чувств у новинки – набор лазерных дальномеров, непрерывно сканирующих окружающий мир в горизонтальной плоскости. Смещение машины вверх-вниз позволяет ей выстраивать карту помещений в объёме, тому же способствуют и лёгкие наклоны корпуса.
Эти колебания, происходящие естественным образом из-за воздушных потоков, могли бы сбить электронный мозг робота с толку – ведь в таком случае лучи идут по косой и нарушается оценка расстояния до предметов. Но ведомая профессором Николасом Роем (Nicholas Roy) команда нашла выход: в робота встроили гироскопы и акселерометры, с высокой точностью определяющие крен. Специальный алгоритм в реальном времени вносит поправку на наклон при оценке отражений от лазеров.
Одновременно программа борется со сносом, возникающим из-за случайного наклона корпуса, обдумывает дальнейшие шаги (смотрит, где машина уже побывала и где просматриваются неисследованные тупики), и всё – достаточно быстро, чтобы машине не приходилось "садиться и думать", ведь в ответственном задании (разведка, поиск пострадавших в аварийном здании и так далее) каждая минута на счету. Такая продуманность софта и придаёт машинке удивительные способности.
Есть ещё ряд хитростей. Если робот летит по длинному коридору, в котором теряется его луч (дальномер работает до 30 метров), софт направляет лазеры чуть в сторону, так, чтобы они постоянно "цеплялись" за стены и предметы. Таким образом, машина не только избегает препятствий, но и определяет собственную скорость, корректируя её, чтобы не врезаться во что-нибудь.
В дополнение к лазерам MAV от Robust Robotics оснащён оптической системой, помогающей определять препятствия, и видеокамерой, ведущей репортаж для людей-наблюдателей (в принципе у машины есть и банальный режим дистанционного управления, но главная её изюминка – именно возможность самостоятельной работы). А как MAV проявил себя, мы сейчас расскажем.
Минувшим летом Международная ассоциация беспилотных транспортных средств (AUVSI), объединяющая разработчиков автономных летающих, плавающих и ездящих машин, провела очередное соревнование летающих роботов — IARC (International Aerial Robotics Competition). Это состязание принимал у себя университет Пуэрто-Рико в Маягуэсе (University of Puerto Rico at Mayaguez).

Цель AUVSI – претворение фантастики в жизнь. Чтобы построить такого разведчика, в первую очередь стоит подумать о его "мозгах". Именно их и тренируют конкурсы этой ассоциации (иллюстрация AUVSI).
Ежегодное соревнование проходило в 19-й раз, но впервые в его истории случился приятный рекорд. Поясним, для команд-участниц и их автономных машинок организаторы IARC придумывают так называемые миссии – сценарии работы устройств и определённые задания. И в нынешнем году миссия была всего-то пятая по счёту. Почему? А просто задание сменяется только после того, как хоть одна команда его выполнит (и выиграет главный приз).
Так вот, до сих пор ни разу ни один университет или компания, привозившая своего робота на IARC, не выигрывала миссию в первый её год. Начальную задачу от AUVSI команды штурмовали три года подряд, а четвёртую (решённую в 2008-м) – аж в течение восьми лет кряду.
Robust Robotics Group же совершила маленькое чудо – она выиграла IARC 2009, опередив шестерых соперников и успешно выполнив миссию номер пять в первый же год её объявления. А ведь сложность конкурсов постоянно росла.

Robust Robotics MAV в лабиринте и глава группы Николас Рой (кадры AUVSI, MIT).
Так, в первой миссии беспилотники должны были самостоятельно перенести небольшой груз из одного конца площадки в другой, а в четвёртой – пролететь по открытой местности три километра, а затем найти определённое здание и залететь в него. Пятая же миссия – это ориентация в закрытом помещении без каких-либо внешних сигналов, не важно, со спутника ли, от радиомаяков или от пульта дистанционного управления. Причём это помещение, про которое робот не должен заранее ничего "знать". Хорошо, что аппарат от Robust Robotics заранее потренировался у себя на родине.
Страшную историю по мотивам известной катастрофы придумали устроители этой битвы, чтобы обыграть сценарий пятой задачи. В некоем Украинистане взорвался реактор на АЭС. Люди или погибли, или срочно эвакуированы, уровень радиации – зашкаливает за все мыслимые нормы. Аварийная автоматика заглушила два из трёх оставшихся реакторов, но ещё один остался включённым, что представляет опасность.
Робот должен через разбитое окно попасть внутрь станции, пролететь через все коридоры и узнать (по светодиодам) "главный пульт управления". Его изображение MAV и обязан передать людям по радио, чтобы специалисты оценили положение тумблеров, увидели сигналы индикаторов и придумали выход из положения.

Легенда для пятой миссии была придумана с размахом, хотя декорации оказались примитивными на вид. С другой стороны – это же не представление (иллюстрации AUVSI).
Лабиринт-АЭС в Пуэрто-Рико построили из фанеры и картона. Так же как и главный пульт. Внутри расставили толику препятствий. И пригласили команды.
MAV из Массачусетского технологического – единственный из целого ряда машин безукоризненно справился (пусть с четвёртой попытки): он долетел до помещения с пультом, не врезавшись ни в один предмет, опознал пульт по лампочкам и передал картинку судьям. И уложился притом в пять минут. Как это произошло, можно увидеть на снимках и видео ниже.

Помыкавшись между декорациями и составив их план, робот увидел "пульт АЭС" (внизу слева – кадр с бортовой камеры). Справа внизу: команда-победитель у знаменательного "пульта" (фотографии AUVSI).
$10 тысяч призовых дополнили радость массачусетской команды. Более того, по правилам IARC, ни разу ещё не применявшимся, группе Николаса вернули $1 тысячу вступительного взноса. Как раз за то, что победа пришла в первом же году существования новой миссии. Так что в 2010-м AUVSI разыграет уже миссию номер шесть.
В соответствии с принципами IARC это будет задание, которое не может в данный момент выполнить ни один существующий гражданский или военный робот-беспилотник.
Машинка должна незаметно проникнуть в здание разведки республики Нари, окружённое забором под напряжением, используя слепые зоны камер безопасности (информация добыта заранее) и избегая регулярных обходов стражи, найти определённое помещение, а в нём – лежащую флешку с секретной информацией.
Флешку нужно изъять, а на её место положить такую же пустую, чтобы противник не заметил пропажи, после незаметно вылететь из здания. И всё это – без дистанционного управления, руководствуясь только своим "умом".

Завлекательные рисунки для иллюстрации шестой миссии. Эксперты предсказывают, что для её выполнения машинкам придётся существенно нарастить свои таланты в пространственной ориентации, ускорить работу "мозгов" (иллюстрации AUVSI).
Разумеется, никакой республики Нари нет, как не существует и Украинистана, а грозное здание разведслужбы будет выстроено всё в том же кампусе университета Пуэрто-Рико из досок и папье-маше. Но от этого роботам, которые выйдут на старт в августе, легче не станет.
Призовой фонд соревнования на 2010-й опять составляет $10 тысяч, но каждый последующий год, если никто не выполнит задачу, устроители будут увеличивать приз ещё на $10 тысяч. Интересно, сколько лет миссия-6 будет считаться невыполнимой?
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте